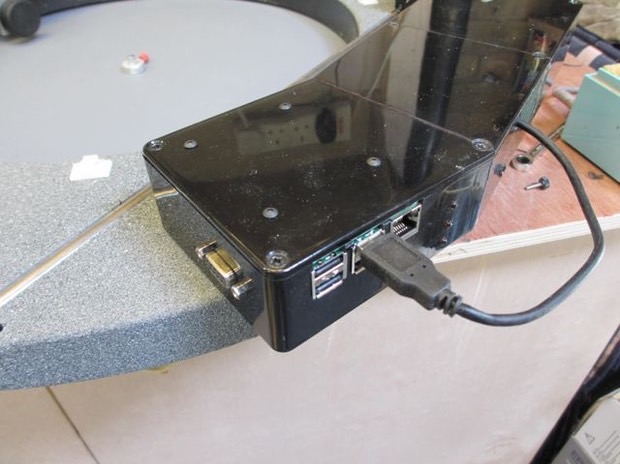



At last it was time to add the Raspberry PI to the system. There was just enough space in the servo box for the rPI, plus a “level converter” needed to provide a serial port to talk to the Nexus DSC.

I have arranged it so that the Phidget drive system is controlled by a USB lead that loops out of the box. I can plug it back into the rPI for local control, or plug it into my Mac Book Air via an extension lead.