Plate-Solvers Compared
Astrometry.net
My digital finder journey started out using astrometry.net as the core plate-solver. I could see it was being used by many others, both amateur and commercial, and it was easy to access from my own python code. It has proved very reliable with very few failures to solve and it even works when stars are barely visible to the eye. It is quite fast if you specify the pixel scale of the image accurately, and then blind solving is about the same speed as when an RA and Dec seed is given.
Tetra3
I’ve been monitoring others’ progress using Tetra3. I was told it can give very fast results, but needs extra work in preparing the database. Also it wasn’t as reliable as astrometry.net so I had no reason to change.
But then I started developing 'eFinder Lite’. Running on a Pi Zero 2 it really struggled with astrometry.net. 10 seconds to solve wasn’t unusual (compared with <1 second on a Pi5).
So I loaded up Tetra3 on to my test rig and started feeding it test images. For about a week I barely got a solve but then it all came together. Indeed the database needs to be built customised to your camera and lens. Then for a solve Tetra3 needs again accurate information about your image.
On a Pi5 I could get down to 200ms solve time, and on a PiZero2 about 2-3 seconds. Importanly, reliability was proving to be quite good.
Cedar-Detect
I noticed that PiFinder uses cedar-detect for the star extraction before feeding the results into the Tetra3 solver. Cedar is a suite of applications that can deliver a complete camera control, star extraction and plate-solve system. It is designed for speed and continuous solving at 10Hz is even possible, (or faster!). Importantly for me, the cedar-detect module can be used on its own, feeding into Tetra3. Addtionally the author has optimised the database used by the Trtra3 solver too.
Installation of cedar-detect isnt completely straightforward, but helpful instructions for migration from Tetra3 are given. The same requirements for careful generation of a bespoke database and args when calling cedar-detect are necessary.
Results are impressive. With the right images, total detect and solve time of around 12ms on a Pi5 are possible and 200ms on a Pi Zero2. I say 'right images' as the star detect process whilst extremely fast, is not as robust as Tetra3 or astrometry.net. Care must be taken to prevent stars saturating, but a simple exposure control can take care of that. For my eFinder focus utility, I need to revert to Tetra3 as cedar-detect cannot register out-of-focus stars, but utility is only used once per session at most and so Tetra3 is fine. Even with UK summer night skies, I’m getting reliable results with 0.1 second exposures on my Pi HQ camera.
Conclusions
For me it is ‘horses for courses’. Astrometry.net remains the most reliable solver, easy to integrate into my code and the on-line server is a useful asset. For my systems that use a Pi5 (ScopeDog and standard eFinder) I am in no hurry to change the plate-solver. No need. The second it takes to solve an image is not excesssive when part of the overall observing process.
Where speed is important or processing power is limited, then Tetra3 wins hands down. For most of these applications, using Cedar-Detect as the front end is an obvious choice. As shown by PiFinder, this opens up the prospect of replacing encoders with a digital finder, running faster than 1Hz. But take note of the stricter image quality requirements (although I suspect the author is working on this).
My eFinder Lite prototype is now reliably solving images in 0.2 seconds. USing the Pi Zero 2, the whole eFinder has just one cable. A USB to the Nexus DSC USB port. This provides power and data each way.
Latest eFinder Lite tweak
Having a camera based device with no image display is an interesting challenge. My latest extension seems to solve most issues.
It displays a patch of 32x32 pixels around the brightest star in the image, its max value, the number of stars found, and the current exposure value, plus a PSF of the star as a plot.
As long as you arent too far away from focus, this works really well in tweaking focus and adjusting exposure to get a reliable capture of stars (as determined by the Tetra3 centroid extraction)
The OLED has no greyscale so the star image is very crude, but does help. The PSF and star count are key.
I want to add it to my standard eFinder, but I have to send the frame down the USB from Pi5 to the handbox Pico. More learning required!

New eFinder ‘Lite'
Having developed and improved the eFinder, it had reached a good point to leave it as is. Quite a few people around the world have or are building their own, and it seems to be a stable design now. So what next!
I had previosuly tinkered with the Raspberry PI HQ camera (cheap and small) but left it in favour of the ASI 120 and its very good sensitivity and low noise. But others have had success (eg PiFinder) so time to have another look. Also, the Pi Zero 2 W was worth a look as an alternative to the Raspberry Pi4 or 5. It has a quad core processor, GPIO pins camera interface and can run Debian 12 which I use in eFinder. Drawbacks are slower clock speed, very low RAM size (512MB) and one only USB port.
Along with the change in camera and processor, I decided to look at Tetra3 as an alternative to astrometry.net as the plate-solver.
A fuller description of the build and how to copy it is here. But here are some ‘highlights’ …
- With a faster lens (25mm f1.2) the Pi HQ camera can produce acceptable images with 1 second exposures.
- The Pi Zero 2W will run my eFinder code, after a bit of slimming down. It's slow to boot and load, but once done it is OK.
- Tetra3 is amazingly fast. It does need care in generating its search database and setting its solve parameters but once that is worked out, I can get solves in 100ms!
- The power consumption of the eFinder LIte is so low it can be powered via the USB cable connected to the Nexus DSC port.
- A really simple solution. One assembly and just a single cable to the Nexus DSC.

A busy Spring
As the nights get shorter up here at 51deg N Latitude, the observing season finishes. Two good star parties (Kelling Heath & Haw Wood Farm) allowed me to test some new ideas.
Quite a few others are building eFinders and ScopeDogs, and so quite a lot of time has gone into supporting their builds and commissioning. Much of this is helping people up the learning curve, but also a lot is overcoming faulty hardware - buck converters and ttl-2-usb adapter cables have been amongst the worst offenders. The moral is dont buy cheap, or you may well have to buy twice (at least!) and spend a lot of time fault finding.
I’ve finally produced a ScopeDog that doesn’t use encoders (or a DSC at all). I’m calling it 'ScopeDog Lite’. I was not optimistic at first as to how it would work in practice, but with the stunning fast solve time of the Pi5, its actually rather effective. Basically the ScopeDog uses motor steps to keep tabs on where it is pointing, with a plate-solve every so often to keep it accurate. Sounds easy, but it wasn’t and providing a stable wifi link to SkySafari was the most challenging.
I succumbed to the Seestar S50 temptation. I’m not getting into astrophotography but it great for using short gaps in the clouds. When I’m using my 18” it sits on the ground nearby as my little observing companion. I’ve been impressed for what you get and can achieve for the price.
Last month saw the 60th anniversary of Mustang production. Our club organised a massive meet at Brooklands Museum, about 800 amercian cars!

3D Printer Arrives
I finished my last blog with a comment that I might consider getting a 3D printer. Consider I did and gave myself a Christmas present!
After some research I went for a QIDI X-MAX3. It has good reviews and is near the top end of home machines (Qidi describe it as commercial even). Cheaper machines are OK printing with PLA but this isn’t very durable outside. The X-MAX3 is capable of printing almost any material it seems. Its also big, with a printing volume of over 300mm cubed.

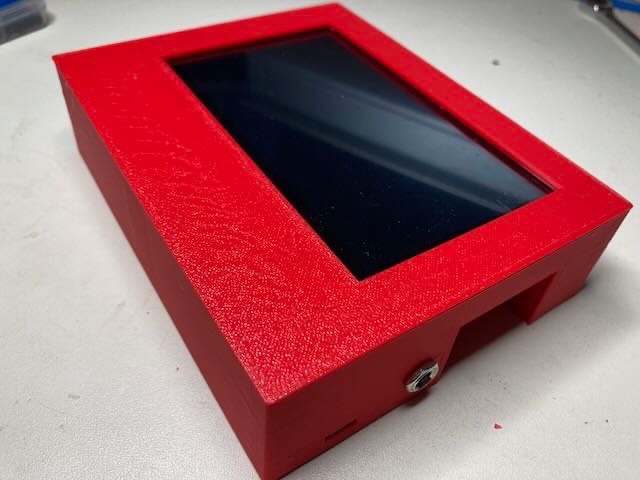
Now I have to learn how to use it (The manual isnt very detailed) and learn to design in 3D. First efforts are OK. The eFinder display box I described in my last blog cost £18 and 4 hours to modify. Now I have designed a printed version, each copy costs about a £1 and requires none of my own time.